频域滤波
- 对图像平滑的低通滤波
- 对图像锐化的高通滤波
- 去除周期的选择性滤波
二维傅里叶变换
二维傅里叶变换:
$$ F(u,v)=\int_{-\infty}^{\infty} \int_{-\infty}^{\infty} f(x,y)e^{-j2\pi(ux + vy)},\mathrm{d}x \mathrm{d}y $$二维傅里叶逆变换:
$$ f(x,y) = \int_{-\infty}^{\infty} \int_{-\infty}^{\infty} F(u,v)e^{j2\pi(ux + vy)},dxdy $$
二维离散傅里叶变换
f(x,y)代表一幅大小为M×N的图像,其中x=0,1,……,M-1,y=0,1,…..,N-1,DFT如下
$$ F(u,v)=\int_{x=0}^{M-1} \int_{y=0}^{N-1} f(x,y)e^{-j2\pi(\frac{ux}{M}+\frac{vy}{N})},\mathrm{d}x \mathrm{d}y $$
IDFT:
$$ f(x,y)=\frac{1}{MN}\int_{x=0}^{M-1} \int_{y=0}^{N-1} F(u,v)e^{j2\pi(\frac{ux}{M}+\frac{vy}{N})},\mathrm{d}x \mathrm{d}y $$
这里的F(u,v)被称为展开的傅里叶级数
频域原点出的变换的值F(0,0)称为傅里叶变换的直流(dc)分量,F(0,0)等于f(0,0)平均值的MN倍。要注意的是在MATLAB中索引是从1开始的而不是从0开始的
MATLAB实现对图像的Fourier变换和逆变换
- Fourier变换,f为原图像
>> F = fft2(f);- Fourier谱
>> S = abs(F);该函数计算的是数组中每个元素的幅值( $ \sqrt{r^2+i^2} $ )
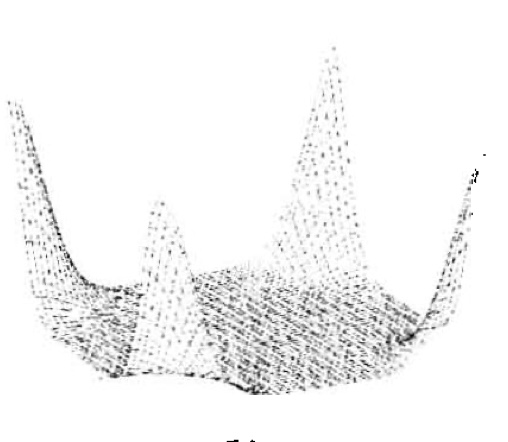
可以在这里观察到4个角的亮点,这就是周期特性的结果,不便观察
- 将交换的原点移动到频域矩形的中心
>> Fc = fftshift(F)频谱范围大,不便观察
- 取模,缩放
S2 = log(1 + abs(Fc));- Fourier逆变换
>> f = ifft2(F);下面是完整代码
img=imread('moon.jpg');
subplot(2,2,1);
imshow(img);
title('原图');
f=rgb2gray(img); %对于RGB图像必须做的一步,也可以用im2double函数
F=fft2(f); %Fourier变换
F1=log(abs(F)+1); %取模,缩放
subplot(2,2,2);
imshow(F1,[]);
title('傅里叶变换频谱图');
Fs=fftshift(F); %将频谱图中零频率成分移动至频谱图中心
S=log(abs(Fs)+1); %取模并进行缩放
subplot(2,2,3);
imshow(S,[]);
title('频移后的频谱图');
fr=real(ifft2(ifftshift(Fs))); %频率域反变换到空间域,并取实部
ret=im2uint8(mat2gray(fr)); %更改图像类型
subplot(2,2,4);
imshow(ret);
title('逆傅里叶变换');结果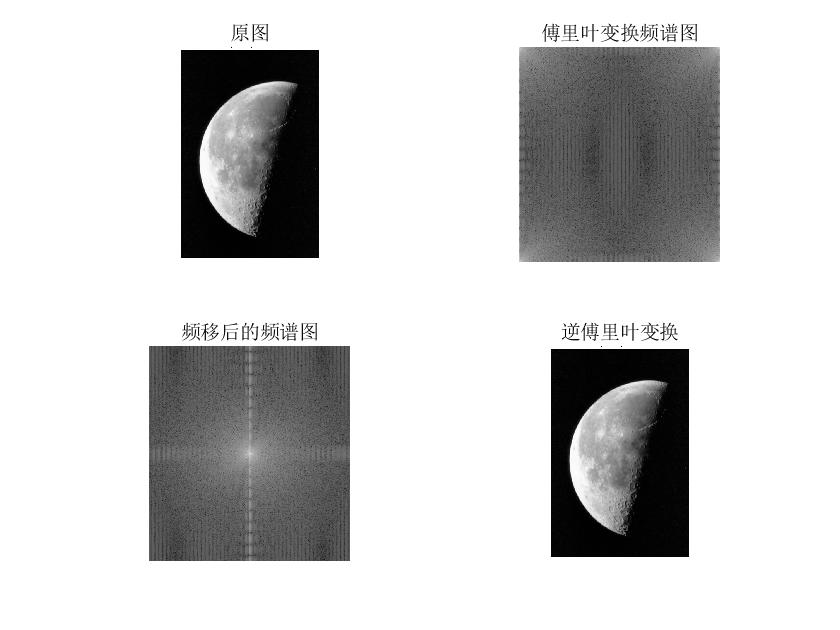
如果使用>> f = im2double(img)进行处理,则会出现以下结果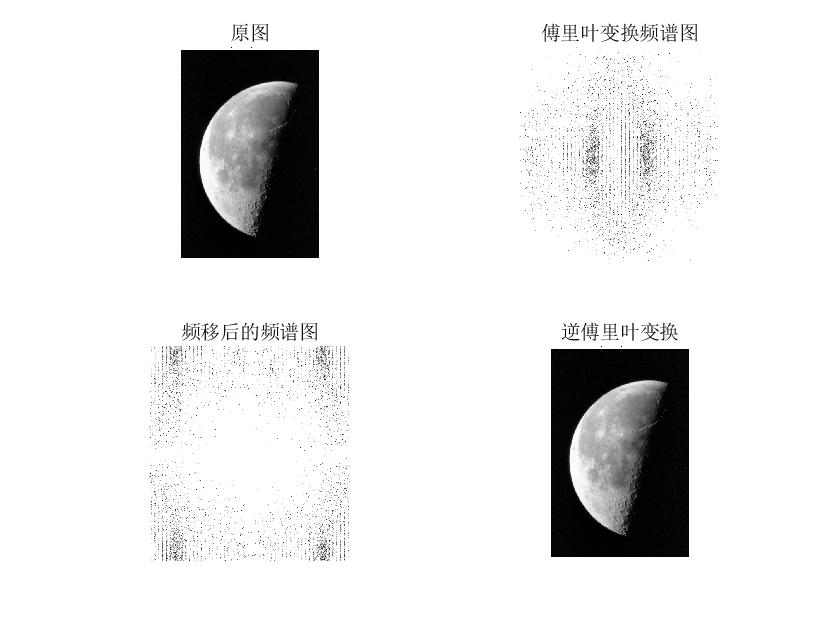
- 分析
- 图像Fourier变换之后立即imshow会报错
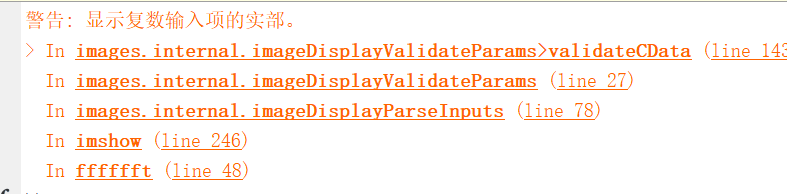
这是因为经过fourier变换之后的图像矩阵为复数矩阵,包含实部和虚部,此时进行abs(f)取复数矩阵的模,再显示。 rgb2gray()和im2double()的使用
这一点要特别注意,对于RGB图像,imread()是已三维矩阵的形式来存储的,要先进行类型转换,否则会出现空白rgb2gray()转换为灰度图像,得到的图像呈灰色基调,见‘结果’im2double()转换成双精度图像,得到的图像呈白色基调,见‘结果’
其他图像处理结果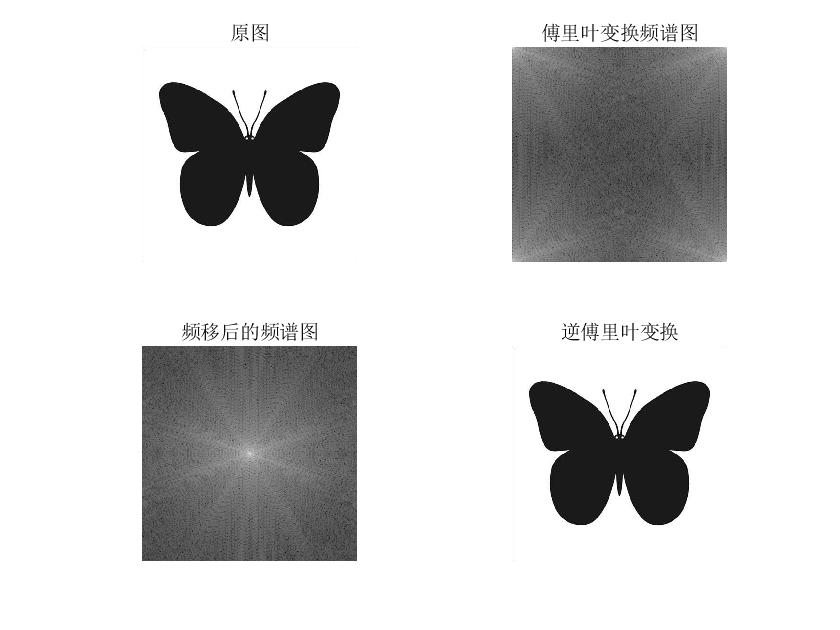
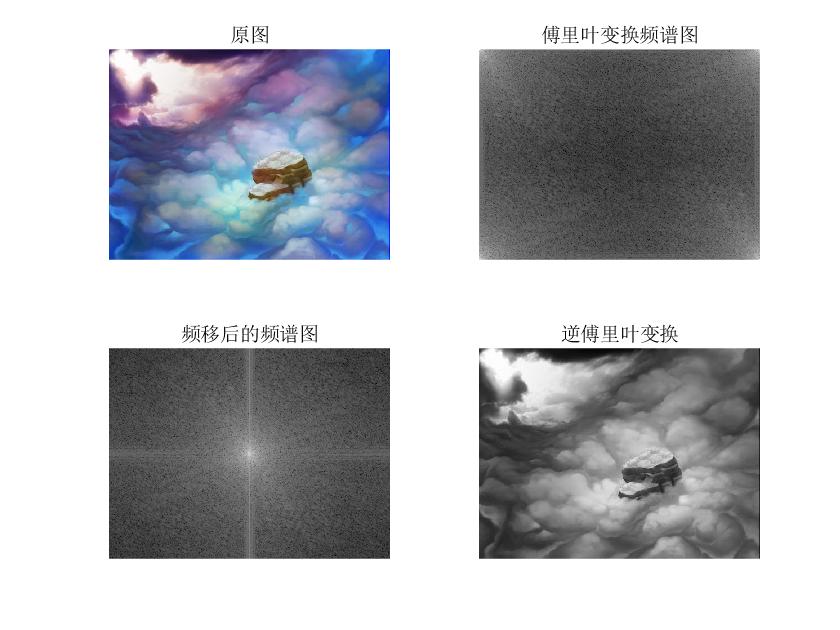
可以看到Fourier逆变换处理之后的图片为原图的灰度图片。
对图像Fourier变换的意义分析
对于一个图像,其频率是表征图像中灰度变化剧烈程度的指标,是灰度在平面空间的梯度。设f为一个能量有限的模拟信号,其傅里叶变换代表f的频谱。从纯粹的数学意义上来看,Fourier变换是将一个函数转换成一系列的周期函数来进行处理的。从物理角度来看,Fourier变换是将图像从空间域转换到频率域,逆变换是将图像从频率域转换到空间域。也就是说,Fourier变换是将图像的灰度分布函数变换成图像的频率分布函数。这里要注意是灰度分布函数,下面还会说到。
Fourie逆变换是将图像的频率分布函数转换成灰度分布函数(原始图像的灰度分布函数),图像的概念前边说过,用一个二维矩阵来表示空间上的各点,z=f(x,y),但空间是三维的,因此空间上的物体在另一个维度上的关系必须由梯度来表示。
Fourier频谱图上的明暗点,意义是指图像上的某一点与邻域点差异的强弱,即梯度的大小。
对频谱移频到原点之后,可以看出图像的频率分布是以原点为圆心,对称分布的.
DFT滤波
滤波步骤
- 用函数
tofloat把输入图像转换成浮点图像>> [f, revertclass] = tofloat(f); - 用函数
paddedsize来获得填充参数>> PQ = paddedsize(size(f)); - 得到有填充的Fourier变换
>> F = fft2(f,PQ(1), PQ(2)); - 生成大小为PQ(1)×PQ(2)的滤波函数H,函数类型要满足如下图所示,
如果是类似这样的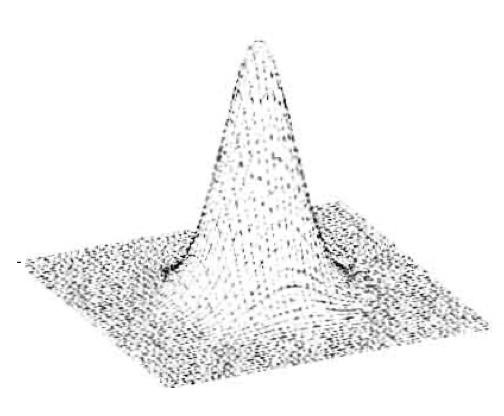
在使用滤波器之前,要先>> H = lpfilter('gaussian',PQ(1),PQ(2),2*sig);H = fftshift(H) - 用滤波器乘以FFT变换
>> G = H .* F; - 获得G的逆Fourier变换
>> g = ifft2(G); - 修剪左上部矩形为原始大小
>> g = g(1:size(f, 1), 1:size(f, 2)); - 把滤波后的图像变换为输入图像的类
>> g = revertclass(g);Matlab实现
f = imread('1.jpg');
f = rgb2gray(f);
%未填充的滤波
[M,N] = size(f);
[f, revertclass] = tofloat(f);
F = fft2(f);
sig = 10;
H = lpfilter('gaussian', M, N, sig);
G = H.*F;
g = ifft2(G);
g = revertclass(g);
figure(1);
subplot(1,2,1);
imshow(g)
title('未填充的滤波');
%已填充的滤波
PQ = paddedsize(size(f));
Fp = fft2(f,PQ(1),PQ(2));
Hp = lpfilter('gaussian',PQ(1),PQ(2),2*sig);
Gp = Hp.*Fp;
gp = ifft2(Gp);
gpc = gp(1:size(f,1),1:size(f,2));
gpc = revertclass(gpc);
subplot(1,2,2);
imshow(gpc);
title('已填充的滤波');这里展示了不填充滤波和填充滤波的两种情况,结果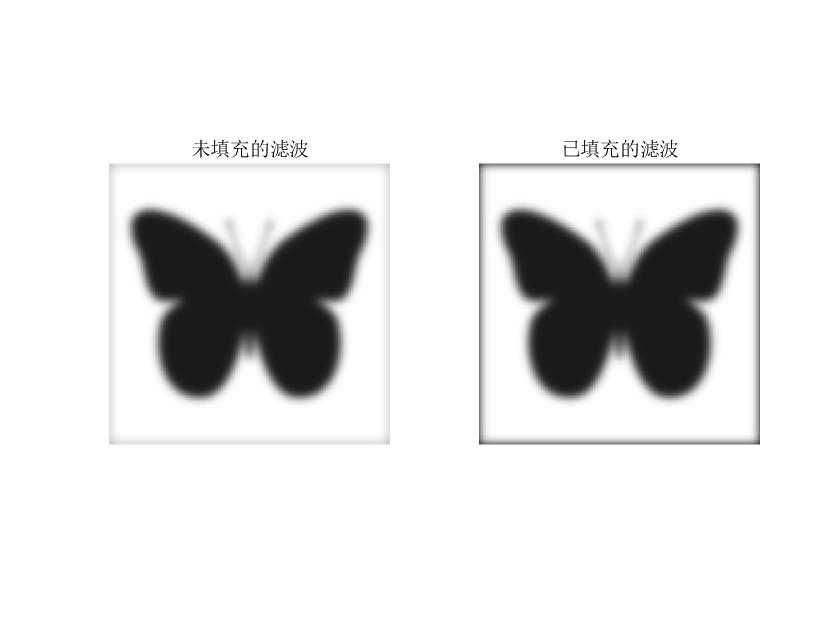
可以观察到未填充滤波处理后图像的垂直边缘未模糊
涉及到的函数
- paddedsize函数
function PQ = paddedsize(AB, CD, PARAM)
if nargin == 1
PQ = 2*AB;
elseif nargin == 2 & ~ischar(CD) %如果CD不为字符串
PQ = AB + CD -1;
PQ = 2 *ceil(PQ / 2);
elseif nargin == 2 %如果CD处为字符串
m = max(AB);
P = 2^nextpow2(2*m); %取2的整数次幂
PQ = [P, P];
elseif nargin == 3
m = max([AB CD]);
P = 2^nextpow2(2*m);
PQ = [P, P];
else
error('wrong number of inputs.')
end- lpfilter函数
function [ H, D ] = lpfilter( type,M,N,D0,n )
%LPFILTER creates the transfer function of a lowpass filter.
% Detailed explanation goes here
%use function dftuv to set up the meshgrid arrays needed for computing
%the required distances.
[U, V] = dftuv(M,N);
%compute the distances D(U,V)
D = sqrt(U.^2 + V.^2);
%begin filter computations
switch type
case 'ideal'
H = double(D <= D0);
case 'btw'
if nargin == 4
n = 1;
end
H = 1./(1+(D./D0).^(2*n));
case 'gaussian'
H = exp(-(D.^2)./(2*(D0^2)));
otherwise
error('Unkown filter type');
end- dftuv函数
function [ U,V ] = dftuv( M, N )
%DFTUV 实现频域滤波器的网格函数
% Detailed explanation goes here
u = 0:(M - 1);
v = 0:(N - 1);
idx = find(u > M/2); %找大于M/2的数据
u(idx) = u(idx) - M; %将大于M/2的数据减去M
idy = find(v > N/2);
v(idy) = v(idy) - N;
[V, U] = meshgrid(v, u);- 总结:
- 图像平滑之后,变得更柔和,但也会更模糊
- 会出现的问题:图像的边缘部分往往也处于高频,会被滤除